Time of Flight (ToF) technology is a method used by sensors to determine the distance of an object by emitting modulated near-infrared (or visible) light. The light is reflected when it comes into contact with an object and the sensor calculates the time or phase difference between the emitted and reflected light. This information is then used to calculate the distance of the object being imaged and generate depth information. By combining this with conventional camera photography, a three-dimensional representation of the object's outline can be created, with different colors representing different distances in a topographical map.

3D data

Avoid errors caused by 2D images

Wide applications

2D Map(X,Y)
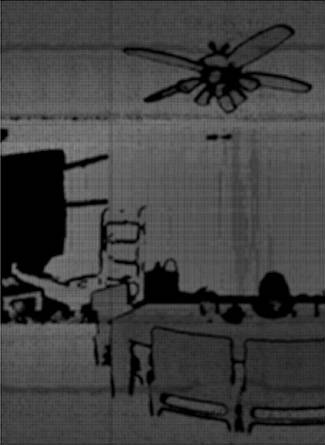
Depth Map(Z)
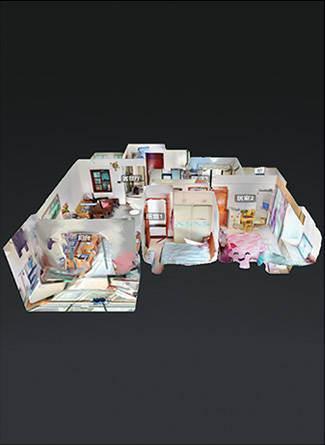
3D Map(X,Y,Z)
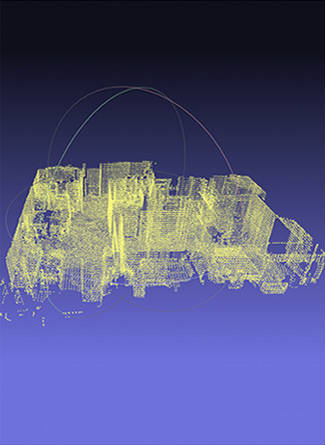
Point Cloud(X,Y,Z)
In many scenarios, there is a need for ToF technology: for example, in the robotics industry, in order for human robots to better perceive their surroundings and further prevent robot-to-human and robot-to-robot collisions, we need to add one or several additional ToF cameras to the robot's 'two eyes' to accurately depict the surrounding environment. Robots here can be narrowly defined as humanoid robots or broadly defined, for example: sweeper robots, cars, AGVs, drones, etc. There is also a demand for ToF technology in the consumer electronics sector, for example in the camera module of the iPhone, where ToF technology is used to quickly determine the distance between the subject and the camera by means of a laser pulse, so that the focal length can be quickly adjusted and clear photos can be taken quickly in dark light conditions.
D-ToF Chip

M8001

i2001

R5001
i-ToF Module

CS40

CS30

CS20-P

CS20
Development Boards

R5001 Evaluation kits